телеметрическое
устройство для исследования процессов пиления древесины и древесных материалов
Лукаш В.Т., Кравченко С. А. (БГТУ, г.Минск, РБ)
The telemetering
device for research of wood materials sawing
Изучение режимов резания при пилении древесных плитных
материалов представляет теоретический и практический интерес. Получение данных о силовых и качественных характеристиках процесса необходимо для расчета рациональных режимов
резания, проектирования станков и режущего инструмента.
Существующие методы определения усилий, воздействующих на дереворежущий инструмент при обработке древесины и древесных материалов, к сожалению, не дают возможности их регистрации с достаточной достоверностью, что не позволяет правильно выбрать параметры инструмента и режимы его эксплуатации, а также определить необходимые прогнозные показатели его работы (надежность, долговечность, и др.), имеющие большое значение при организации технологического процесса.
С целью повышения точности исследования сил резания, возникающих при обработке древесины и древесных материалов, кафедра деревообрабатывающих станков и инструментов Белорусского государственного технологического университета предлагает использовать измерительное телеметрическое устройство (рис. 1).
Устройство
монтируется на экспериментальной
установке, созданной на базе вертикального фрезерного станка с нижним
расположением шпинделя. Предназначено для измерения сил
резания путем усиления, преобразования и беcконтактной передачи на измерительный прибор сигналов тензорезисторов, расположенных
на силоизмерительной оправке, оборудованной режущим инструментом [1].
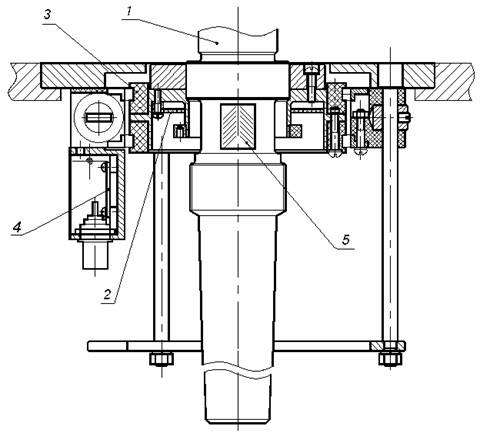
Рис. 1. Устройство силоизмерительное телеметрическое:
1 – оправка силоизмерительная; 2 –
передатчик; 3 – трансформатор;
4 – приемник; 5 – тензорезистор
С помощью устройства могут быть выполнены измерения крутящего и изгибающего моментов, по которым можно рассчитать модуль силы резания и ее направление.
Устройство состоит из следующих основных
частей: устройство
силоизмерительное; блок измерительный; кабель питающий; кабель сигнальный;
оправка силоизмерительная.
Принцип работы каждого измерительного канала силоизмерительного устройства основан на предварительном усилении и преобразовании разбалансированого сигнала тензомоста в цифровую форму с использованием последовательной кодировки Манчестер II и передачи полученного сигнала посредством трансформаторной связи на приемник. Сигналы разных каналов передаются последовательно.
С приемника сигнал по экранированному кабелю поступает на декодер, где осуществляется обратное преобразование кода Манчестер II в параллельную байтовую форму.
Питание тензомостов и схемы передатчика
осуществляется через тот же трансформатор, через который передается и сигнал.
Конструктивно
передатчик имеет цилиндрическую форму. На образующей цилиндра намотаны питающие и сигнальные катушки. В торце передатчика
расположен разъем для подключения тензомостов. Функциональная электрическая
схема передатчика показана на рис. 2.
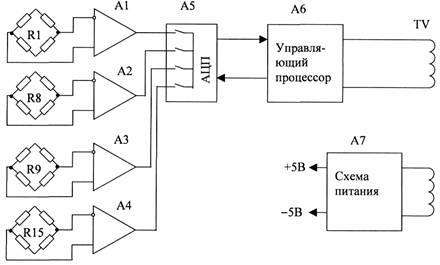
Рис. 2. Функциональная электрическая схема передатчика
Приемник предназначен для приема и усиления сигналов передатчика, а также для обеспечения передатчика и измерительных тензомостов электропитанием.
При проведении замеров приемник необходимо располагать так, чтобы его одновитковые катушки-кольца располагались точно над катушками передатчика.
Блок измерительный выполнен в виде настольного прибора и состоит из следующих основных частей: вторичного источника питания; декодера; ВЧ генератора; модуля индикации. Вторичный источник питания вырабатывает необходимые напряжения постоянного тока, используемые для питания приемника и остальных частей самого блока.
Декодер преобразует последовательный код Манчестер II в параллельную байтовую форму, затем с помощью цифро-аналогового преобразователя преобразует полученную информацию в аналоговую форму и распределяет ее по каналам. Выходной сигнал каждого из каналов фильтруется фильтром НЧ II порядка с частотой среза 1000 Гц. Выходной сигнал каждого канала изменяется в диапазоне ±5 В при подаче на вход соответствующего канала номинального входного сигнала, равного ±1 мВ/В.
Модуль индикации позволяет просматривать выходной
сигнал выбранного канала. Индикатор имеет два диапазона индикации –1000 мкВ/В и
100 мкВ/В. Диапазон индикации выбирается тумблером расположенным на передней
панели измерительного блока.
Методика определения сил резания основывается на принципе измерения сопротивления металлов и полупроводников под действием деформаций, вызванных этими силами [2].
Величина измеренной относительной деформации
может быть оценена по формуле (1):
![]()
![]() (1)
(1)
где εi –
относительная деформация, Еод; βиi – показания цифрового индикатора, мкВ/В; Sт – коэффициент тензочувствительности
тензорезисторов (равен 2,08).
Величина крутящего момента может быть оценена
следующим образом:
![]() (2)
(2)
где εкр – относительная
деформация датчика крутящего момента; G – модуль сдвига стали (80 000 Н/мм); Wкр – крутящий момент сопротивления сечения, мм3;
b – размер стороны квадрата силоизмерительной
оправки в месте расположения тензорезисторов
(
Величина изгибающего момента определяется по формуле (3):
![]() (3)
(3)
где εизг – относительная деформация датчика изгибающего
момента; Е – модуль упругости стали (220 000 Н/мм2);
W – момент сопротивления сечения, мм3.
Осевая сила определяется по формуле (4):
![]() (4)
(4)
где
μ – коэффициент Пуассона
(приблизительно равен 0,3 для стали);
εос – относительная деформация датчика осевого усилия; S – площадь сечения оправки в зоне расположения
тензорезисторов, мм2.
На рис. 3 схематично показаны усилия, действующие
на инструмент в процессе резания.

а) б)
Рис. 3. Схема определения направления главного вектора силы ![]()
Выражения для определения крутящего и изгибающего моментов, действующих на инструмент от равнодействующей сил резания, имеют следующий вид:
![]() ,
, ![]() , (5)
, (5)
![]() (6)
(6)
где
h – расстояние от точки
приложения силы ![]() до тензодатчика; l – расстояние от центра инструмента до линии действия главного вектора
силы
до тензодатчика; l – расстояние от центра инструмента до линии действия главного вектора
силы ![]() .
.
Зная
расстояние h и величину изгибающего момента Мизг, которая определяется по
формуле (2), легко найти равнодействующую сил резания:
![]() (7)
(7)
Подставив
в формулу (5) для определения Мкр
выражение (7), выразим расстояние от центра инструмента до линии действия
главного вектора сил ![]() . После преобразований получим:
. После преобразований получим:
 (8)
(8)
Угол между направлением действия главного вектора сил резания и касательной к окружности резания (угол φ), проведенной в точке приложения силы (рис. 3, б), определяется следующим образом:
![]() . (9)
. (9)
Касательная и радиальная силы резания определяются следующим образом:
![]()
![]() (10)
(10)
Особенность предложенного
устройства:
– получение более точных значений измеряемых величин по сравнению с показаниями других средств измерения;
– полученные данные позволяют выбрать наиболее оптимальные параметры и конструкции инструмента для обработки древесины либо древесных материалов.
Это, в свою очередь, позволит добиться более высокого качества обработки одновременно с повышением производительности и снижением энергозатрат процесса.
Литература
1. Руководство по эксплуатации устройства ТТ4010 для регистрации сил резания на фрезерном станке с нижним расположением шпинделя.
2.
Тензометрия в машиностроении: Справочное пособие / Под ред. Р. А. Макарова. М.:
Машиностроение, 1975. – 288 с.