Гороновский
А.Р., Голякевич С.А.
(БГТУ, г. Минск, Республика Беларусь) golsera@rambler.ru
ВЫБОР
ЭФФЕКТИВНЫХ ПАРАМЕТРОВ ПРИВОДА МНОГООПЕРАЦИОННЫХ ЛЕСОЗАГАТОВИТЕЛЬНЫХ МАШИН
CHOICE OF EFFECTIVE PARAMETERS OF THE DRIVE
OF MULTIOPERATIONAL FORESTMASHINS
ARTICLE IS DEVOTED A
SUBSTANTIATION PARAMETRES OF A DRIVE OF THE PROCESS EQUIPMENT AND RUNNING
SYSTEM, ALSO A CHOICE OF CRITERION OF AN ESTIMATION OF AN OVERALL PERFORMANCE HARVESTERS
FROM THE POINT OF VIEW OF PRODUCTIVITY AND POWER BENEFIT.
Снижение
эксплуатационных затрат при работе лесных машин является важной прикладной задачей.
Одним из путей ее решения является выбор рациональных параметров привода
технологического оборудования и движителя для заданных эксплуатационных
условий. Для большинства лесотранспортных машин (трелевочных тракторов,
форвардеров, автомобильного лесовозного транспорта) существуют известные методики
такого выбора, однако они не применимы к лесным машинам, выполняющим технологические
операции не связанные с передвижениями самой машины (харвестерам).
При
выборе мощностных параметров двигателя многооперационных лесных машин обычно
руководствуются максимальными затратами мощности на привод движителя [1].
Практическое применение таких машин показало, что мощности двигателя,
выбранного по такому критерию, часто не достаточно для производительной работы
харвестера.
Для
подобного типа машин может применяться методика, основанная на выборе параметров
по максимальным мощностным потребностям технологического оборудования (манипулятора
с харвестерной головкой) [2]. Однако такая методика также не оправдала себя.
С целью выбора рациональной методики расчета по
обоснованию параметров привода технологического оборудования и движителя, а
также выбору критерия оценки эффективности работы харвестера, с точки зрения
производительности и энергозатратности, нами были рассмотрены энергетические
затраты следующих технологических операций: перемещение харвестера в условиях
лесосеки, обрезка сучьев при протаскивании дерева в харвестерной головке, как
отдельная операция, и протаскивание дерева в харвестерной головке, совмещенное
с
его перемещением в различных плоскостях при помощи манипулятора.
Использование
расчетных методик [1] и [2] позволило установить, что величины мощностей требуемых
на протаскивание дерева в харвестерной головке и на перемещение по лесосеке для
харвестеров различного назначения соотносятся по-разному. Для
примера, рассмотрим графики зависимостей мощности затрачиваемой на
движение харвестера с колесной формулой 4К4 с равномерно распределенными опорными
реакциями со скоростью ![]() при таких
рубках согласно [3], как правило, не превышает 13-
при таких
рубках согласно [3], как правило, не превышает 13-
|
Мощность, Вт |
|
Мощность, Вт |
|
|
а |
|
б |
Вес
харвестера, Н |
Рисунок
1 – Зависимости изменения мощности необходимой на:
а) привод
технологического оборудования, б) движителя
при
различных эксплуатационных условиях.
Иначе
дело обстоит с соотношением мощностей для харвестеров работающих в условиях рубок
главного пользования. Там в основном применяются шасси с колесными формулами
6К6 и тяжелые модели 8К8. Большинство таких харвестеров имеют
массу в пределах от 12,5 до 16 т для 6К6 и до 22-23 т для 8К8.
Мощность необходимая для преодоления сил сопротивления движению для харвестеров
8К8 достигает 55 кВт при скорости движения
|
Мощность, Вт |
|
Мощность, Вт |
|
|
а |
Вес
харвестера, Н |
б |
Вес
харвестера, Н |
Рисунок
2 – Зависимости мощности необходимой на привод движителя:
а) скорость движения
Мощность привода харвестерных головок в этом случае достигает
95 кВт и более (рисунок. 1а) при обеспечении скорости протаскивания
5 м/с. Это означает, что для большинства харвестеров, применяемых на
рубках главного пользования, мощность привода харвестерной головки на 20-30 кВт
больше мощности требуемой для привода колесного движителя даже для высоких для
таких условий скоростей передвижения.
Многие
операторы используют на практике совмещение операций – способ работы, когда
выполнение нескольких технологических операций происходит параллельно. Наиболее
распространенными такими операциями являются одновременное протаскивание дерева
в харвестерной головке и его перемещение к месту раскряжевки. Такое совмещение
позволяет сократить время рабочего цикла харвестера, однако требует большей
мощности на одновременный привод манипулятора и харвестерной головки. Анализ
нагруженности шарнирно-рычажного манипулятора с телескопической рукоятью позволил
установить зависимость между мощностью, затрачиваемой на привод манипулятора, и
вылетом при различных диаметрах дерева (рисунок 3).

Рисунок
3 – Зависимость мощность привода манипулятора
от
его вылета при различных диаметрах d1,3
(графики
построены для диаметров деревьев от 26 до
Для
диаметров деревьев 32-
Обоснованное
снижение проектной мощности привода технологического оборудования харвестера и
энергонасыщенности харвестера в целом требует выбора комплексного критерия
оптимизации его параметров. Максимальная мощность привода технологического
оборудования, указанная выше, будет использоваться крайне редко. Для примера рассмотрим случай работы харвестера при сплошных
рубках главного пользования, на лесосеке имеющей следующие параметры
распределения деревьев (нормальный закон распределения):
µ —
математическое ожидание диаметров деревьев (
σ
— среднеквадратичное отклонение (
На лесосеке присутствуют деревья различного диаметра от 10 до
Одним
из путей снижения величины максимальной мощности является уменьшение скорости протаскивания деревьев большого диаметра. Однако это
влечет за собой снижение производительности работ харвестера.
В
качестве оптимизационного критерия параметров производительности и энергонасыщенности
нами был рассмотрен энергетический потенциал производительности (ЭПП),
предложенный в [4] Ю.В. Гинзбургом и А.И. Шведом для комплексной оценки
эффективности дорожно-строительных машин. Данный критерий был доработан и изменен
с учетом специфики лесозаготовительных работ. В нашем случае ЭПП представляет
собой произведение производительности операции по обработке дерева и вероятности
его появления с заданными таксационными параметрами отнесенного к требуемой на
эту обработку мощности. Для варианта обрезки сучьев без использования совмещения
операций выражение для определения ЭПП выглядит следующим образом:
![]()
где ![]() – вероятность появления дерева в заданном
промежутке диаметров;
– вероятность появления дерева в заданном
промежутке диаметров;
![]() - скорость протаскивания дерева в харвестерной
головке;
- скорость протаскивания дерева в харвестерной
головке;
![]() - мощность, требуемая для обрезки сучьев при
заданной скорости протаскивания.
- мощность, требуемая для обрезки сучьев при
заданной скорости протаскивания.
Максимуму
функции ЭПП соответствуют наиболее рациональные для заданных условий соотношения
между производительностью работы и затрачиваемой мощностью. Для найденного
максимального значения ЭПП выбирается соответствующее ему значение мощности при
максимальной скорости протаскивания. Такой выбор обеспечивает возможность
обработки деревьев с диаметром меньше расчетного на максимальной скорости
протаскивания, а деревьев больших диаметров со сниженными скоростями (рисунок 4).
В машине такой подход может быть реализован посредствам установки в
гидросистеме регулятора мощности с функцией чувствительности к нагрузке (load-sensing). Это означает,
что мощность привода будет регулироваться путем изменения подачи гидронасоса в
зависимости от потребности технологического оборудования и движителя (в случае
применения гидростатической трансмиссии).
|
Вероятность появления дерева |
|
Мощность, Вт |
|
|
Диаметр дерева
на высоте 1,3 м, см |
|
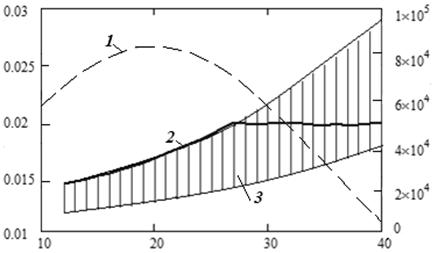
Рисунок
4 – Использование ЭПП для определения необходимой мощности
привода
харвестерной головки.
1 – график
распределения деревьев по диаметрам; 2 – изменение мощности с увеличением
диаметра дерева; 3 – диапазон изменения мощностей
протаскивания дерева со скоростью от 2 до 5 м/с
Полученное
таким образом значение мощности должно быть обязательно сопоставлено с мощностью,
требуемой для передвижения харвестера. В случае если последняя окажется больше
следует принять ее в качестве проектной.
Анализ
полученных данных позволил установить, что при увеличении диапазона отклонений
диаметров деревьев, максимум ЭПП смещается в сторону больших диаметров. Это
объясняется тем, что деревьев с большими диаметрами становится больше, и
заданной мощности становится не достаточно для обеспечения приемлемой производительности
в таких лесах. Сокращение же величины отклонения диаметров деревьев от среднего
значения, напротив, приближает выбираемое значение требуемой мощности к
мощности необходимой для обработки наиболее часто встречающегося дерева.
Таким образом,
для харвестеров различных колесных формул и массово-геометрических параметров
существуют различные соотношения между технологическими
и транспортными энергозатратами, что необходимо учитывать на этапе проектирования
таких машин. Установлено, что для харвестеров 6К6 мощность необходимая на
привод технологического оборудования больше мощности затрачиваемой на привод
движителя на 20 – 30 кВт при раздельном выполнении операций и до 60-70 кВт при
их совмещении. На основе полученных зависимостей, для харвестеров различного
назначения и условий эксплуатации разработана методика мощностного расчета
привода технологического оборудования и движителя, учитывающая, энергетические
затраты, производительность работы машины и специфику работы оператора.
Библиографический
список
1.
Гуськов В.В. [и др.] Тракторы: Теория: учеб. / под общ. ред. В.В. Гуськова. –
М.: Машиностроение, 1988. – 376 с.
2.
Вороницин
К.И., Гугелев С.М., Машинная обрезка сучьев на лесосеке – М.: Лесн. промышленность
1989. – 272с.
3.
А.П.
Матвейко, А.С. Федоренчик «Технология и машины лесосечных работ»: Учебник для
ВУЗов – Мн.: Технопринт,2002.-480с.
4.
Гинзбург,
Ю.В. Промышленные тракторы / Ю.В. Гинзбург, А.И. Швед, А.П. Парфенов – М.;
Машиностроение, 1986. – 296 с.