А.В.Голенищев,
С.В.Красных, Е.Н.Худорожков
(ООО «УралНИИЛП»)
М.В.Шавнина
(Уральский государственный
лесотехнический
университет)
МЕТОДИКА ОЦЕНКИ ПРАВИЛЬНОСТИ
УСТАНОВКИ ХОДОВЫХ КОЛЕС
ГРУЗОПОДЪЕМНЫХ КРАНОВ
Для специалистов, занимающихся
изготовлением, ремонтом, обслуживанием и техническим диагностированием грузоподъемных
кранов нами предлагается простая, не требующая дорогого оборудования и
достаточно точная методика оценки правильности установки ходовых колес кранов.
Рассмотрим общий принцип измерения перекоса колеса (рис.1).
По ГОСТ
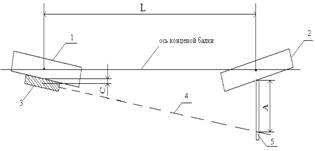
Рис. 1. Принцип измерения перекоса колеса:
1 – колесо, для которого проводится
измерение перекоса; 2 – базовое колесо,
относительно которого проводится измерение перекоса первого колеса; 3 – лазер;
4 – луч лазера; 5 – линейка; А –
измеряемое расстояние от луча лазера до поверхности второго колеса; С – расстояние от луча лазера до поверхности
первого колеса; L – расстояние между колесами
Общий принцип измерения перекоса
колеса заключается в следующем: на
доступной внешней поверхности колеса (для этого достаточно участка 50×150
мм) можно установить лазер, луч которого должен быть параллелен поверхности
колеса или, что то же самое, параллелен оси колеса.
Дальнейшие измерения можно будет проводить уже относительно луча лазера, как
показано на рис.1. В качестве лазера может использоваться недорогая лазерная
линейка. Искомый тангенс угла перекоса оцениваемого колеса определяется как (A – C)/L.
Казалось бы, все просто, но по рис.1, возникают два
вопроса. Как измерить расстояние C? Как оценить
параллельность луча лазера оси колеса?
Предлагаемая нами методика позволяет обойти эти трудности.
Для этого оценка перекоса колеса проводятся
в следующей последовательности.
1. Лазер закрепляется в устройстве,
показанном на рис. 2(б). Угол наклона луча лазера относительно опорной
поверхности рамки выбирается таким,
чтобы он был заведомо больше возможного угла перекоса колеса.
2. Рамка с лазером устанавливается как показано на
рис. 2(а) на одной из внешних сторон колеса, а на втором колесе делается измерение расстояния А от луча лазера до внешней поверхности колеса.
|
а |
б |
|
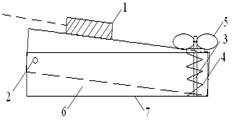
Рис.2. Схема измерений перекоса колеса (а) и
установка лазера на специальной рамке (б): 1 – лазер; 2 – шарнир; 3 – винт; 4 – пружина; 5 – гайка – барашка; 6 – складная
рамка; 7 – опорная поверхность рамки |
|
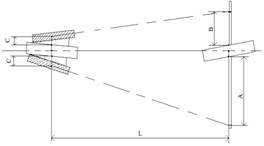
3.Аналогично измеряется расстояние В. Для этого и лазер
и линейка устанавливаются с
противоположной стороны измеряемого и базового колес.
4. Рассчитывается искомый тангенс угла поворота колеса
KК по формуле:
КK = (А – В)/ 2L (1)
Данная формула получена следующим образом. Величина А равна:
![]() , (2)
, (2)
где
КЛ – тангенс угла поворота
рамки лазера (или угла между осью колеса и лучей лазера); КК – искомый тангенс угла поворота колеса.
Величина В, соответственно, равна:
![]() (3)
(3)
Решая эти два уравнения относительно KК, получаем приведенную выше простую формулу для оценки
тангенса угла поворота колеса KК = (А – В)/2L.
Как видно из приведенных вычислений, значения С и КЛ сокращаются, то есть при
двойном измерении с каждой стороны колеса такие параметры как расстояние от оси
лазера до поверхности измеряемого колеса и выбранный угол наклона луча лазера
не имеют значения.
В предлагаемой методике измерения
приняты следующие очевидные допущения:
колеса (измеряемое и базовое) имеют одинаковую ширину; внешние боковые
поверхности каждого колеса ровные и взаимно параллельные; рамка лазера
абсолютно жесткая и угол между лучом лазера и опорной поверхностью рамки
постоянный; колеса находятся строго посередине относительно оси концевой балки
или ходовой тележки.
В качестве недостатков методики можно выделить три момента:
1. Если кран работает вне помещения, то в
солнечную погоду плохо видно луч лазера. Но это общий недостаток всех лазерных
приборов.
2. Колеса имеют наклон в вертикальной плоскости.
Допуск на вертикальный наклон колеса по ГОСТ
3. «Зайчик» лазерного луча от дешевой лазерной указки
на расстоянии 8 и более метров представляет собой круглое пятно с не очень
четкими очертаниями диаметром 5-
Библиографический список
1. ГОСТ 27584 – 88. Краны мостовые и козловые электрические.
Общие технические условия. [Электронный ресурс].- Режим доступа: http//www. kodeks . ru.
2. ГОСТ 28648 – 90. Колеса крановые. Технические
условия. [Электронный ресурс]. – Режим доступа: http//www. kodeks. ru.